Le Hiller VZ-1 Pawnee est un aéronef de forme circulaire, sur lequel le pilote se maintient debout, propulsé par deux moteurs à pistons entrainant deux hélices bipales contrarotatives de sustentation et muni de quatre pieds pour se poser au sol.
Vers 1947, Charles H. Zimmerman étudie un concept basé sur le contrôle kinesthésique. Selon lui, une personne debout, en équilibre sur une petite plateforme horizontale soulevée par un vecteur de poussée verticale, a le réflexe de déplacer son corps pour se maintenir en équilibre, un peu comme sur un surf, ce qui stabiliserait la plateforme et permettrait de la contrôler en tangage et en roulis. Bien que le centre de gravité qui placé très haut sur une telle configuration semble entraîner une importante instabilité, la théorie de Zimmerman s'avère correcte après avoir été testée avec ses Flying Shoes.
Hiller est intéressé par le concept et trouve un accord avec Ch.H.Zimmerman pour poursuivre le développement de son concept, ce dernier reprenant son poste au NACA (National Advisory Committee for Aeronautics) où il continue des études dans ce domaine. Malheureusement, Hiller est accaparé par la finalisation de l’UH-12 et les travaux sont momentanément laissés de côté.
Au début des années 1950, avec les risques de conflits atomiques et bactériologiques, le transport des troupes sur le champ de bataille devient une priorité pour les responsables militaires, d’autant plus que les grands hélicoptères de transports munis de moteurs à pistons semblent avoir atteint les limites de leurs développements. Une alternative séduisante serait le transport individuel par de petits aéronefs faciles à piloter par des soldats, sans qu’ils aient besoin d’une formation longue et complexe. Intéressée par les travaux effectués par Ch.H. Zimmerman, l’US Army signe le 17 septembre 1953 un contrat avec Hiller, ainsi qu’avec De Lackner, pour le développement de leurs aéronefs et la construction de prototypes. Le but étant alors d’évaluer les capacités opérationnelles d’engins de ce type pour le transport tactique et l’observation. Le bureau de recherche naval (ONR, Office of Naval Research) ayant déjà des programmes de recherche communs avec Hiller, l’US Army accepte que l’ONR gère également ce programme en son nom.
Hiller reprend ce concept avec le Model 1031 constitué d’une plateforme circulaire en tubes d’acier, au-dessous de laquelle sont installés deux moteurs à pistons Nelson d’environ 40ch (30kW) qui entraînent directement deux hélices bipales contrarotatives de sustentation installées dans un conduit de 1,52 mètres de diamètre. Le système de transmission est celui d'un hélicoptère modifié et construit par l’entreprise Hall-Scott. Un carénage en fibres de verre installé autour de la plateforme permet de protéger les hélices en vol, de même qu’éviter des accidents avec le personnel au sol ou d’autres aéronefs. Quatre pieds permettent de se poser sans abimer le carénage, ils sont parfois équipés de roulettes pour faciliter le déplacement de l’appareil au sol. Le pilote se place debout sur un piédestal situé au centre et entouré d’un garde-corps circulaire l’empêchant de basculer. Ses pieds sont posés dans des cale-pieds pour lui permettre de doser facilement l’inclinaison de son corps, afin de contrôler l’appareil. Les seules commandes à disposition du pilote sont disposées sur une sorte de guidon de bicyclette et consistent en une manette des gaz et d’un contrôle du couple de l’hélice qui lui permettent de régler l’altitude et la vitesse verticale. Un dispositif de freins différentiels sur les rotors permet un contrôle en lacet amélioré.
Désigné YHO-1E, il est terminé en septembre 1954. Il effectue son premier vol captif avec Philip T. Johnston aux commandes, qui est alors le pilote d'essai en chef de chez Hiller. L’appareil est attaché à des câbles maintenus entre deux tours, afin d’assurer la sécurité du pilote qui est peu protégé en cas de panne de moteur ou de perte de contrôle. Après de nombreux essais en vol captif, il effectue enfin son premier vol libre le 27 janvier 1955. Le contrôle de l’appareil se réalise comme prévu : si la plateforme commence à se pencher dans une direction, le pilote se penche naturellement dans l'autre sens pour rester debout, ce qui place le centre de gravité au-dessus de l'axe de poussée et maintient ainsi un état stable. Le pilote peut contrôler l'appareil simplement en se penchant vers l’endroit où il désire se rendre et la plateforme commence à s'incliner et gagner de l'impulsion dans cette direction. Comme l'aéronef est contrôlé par l'instinct, seule une formation minimale est nécessaire. Autre avantage du système : l’hélice est carénée dans ce que Zimmerman nomme alors l’"anneau Venturi", du nom du physicien Italien, ce qui permet d’obtenir 40% de puissance supplémentaire qu’une hélice de même diamètre sans carénage de ce type.
Les essais en vol démontrent rapidement que l’YHO-1E a une tendance naturelle à corriger automatiquement son assiette dans le vol transversal : la lèvre avant du conduit générant une poussée légèrement supérieure à celle située à l’arrière qui est plus éloignée du sol. Cela a deux conséquences principales : l’appareil est quasiment impossible à renverser, mais par contre la vitesse maximale est limitée à seulement 26km/h et le vol par fort vent se révèle parfois un peu difficile.
Le second prototype, qui est désigné Model 1031-A, est construit avec les deux moteurs couplés pour augmenter la sécurité en cas de panne d’un moteur. Par contre, comme il n’est plus possible d’utiliser un dispositif de freins différentiels sur les rotors, des volets mobiles sont installés à l’entrée de la conduite de propulsion pour améliorer le contrôle en lacet. L’appareil n’étant pas assez puissant pour voler au-dessus de l’effet de sol, les ingénieurs de chez Hiller décide d’augmenter le diamètre des pales et par conséquent de la plateforme. C’est également à cette période que l’US Army désire prendre en main le suivit de l’étude de cet appareil, d’autant plus qu’elle n’est pas satisfaite de l’engin de chez de Lackner, et l’YHO-1E est désormais désigné VZ-1 Pawnee.
Le troisième appareil, le Model 1031-A-1, est donc motorisé par deux moteurs couplés et sa plateforme a désormais un diamètre de 2,13 mètres. Il effectue son premier vol le 20 novembre 1957 et grâce à cette augmentation de puissance, il peut voler nettement plus haut. Malheureusement, il y a aussi sa masse qui est augmentée, ce qui place son centre de gravité plus bas, et augmente la difficulté pour le pilote de guider l’appareil par simple déplacement du corps. Dans un premier temps, le pilote est installé sur une plateforme plus haute pour augmenter l’effet de ses mouvements sur l’engin, mais les améliorations sont peu convaincantes. Par conséquent, un système de stabilisation gyroscopique utilisant les servocommandes installées sur l’UH-12 est ajouté. Ce dispositif commande quatre volets installés sous la plateforme pour dévier l’écoulement d’air soufflé, ce qui permet une nette augmentation de la stabilité en vol stationnaire. L'illustration la plus spectaculaire de son efficacité a été effectuée avec la démonstration effectuée par un tireur d'élite de l'US Army visant et tirant avec son fusil en vol stationnaire libre, sans qu’une quelconque commande ne soit activée pour maintenir l’appareil stable. Malheureusement, en vol horizontal, des oscillations sont toujours présentes.
L’US Army commande alors trois autres appareils désignés VZ-1E, munis de diverses améliorations, pour sa propre expérimentation. Pour plus de sécurité, un troisième moteur est monté, et pour compenser l’augmentation de la masse de l’appareil, le diamètre de la plateforme est augmenté pour y installer des hélices d’un diamètre de 2,44 mètres. Mais le trop grand diamètre et la masse trop importante ne permettent plus un contrôle kinesthésique. Le conduit de propulsion est allongé pour obtenir une plus grande stabilité en vol horizontal, le pilote est désormais assis et des commandes de vol constituées d’un manche à balai commandant des volets de contrôles utilisés non seulement pour le contrôle en lacet comme sur les versions précédentes, mais également pour le déplacement horizontal. Ils effectuent leurs premiers vols en 1959. Grâce à ces diverses modifications, la vitesse de vol est augmentée, même si des oscillations sont toujours présentes.
Le VZ-1E est désormais trop imposant pour vraiment être utile sur le champ de bataille, d’autant plus que les hélicoptères munis de turbines montrent alors de nouvelles perspectives très intéressantes. Le contrôle kinesthésique est également abandonné par Hiller, par contre l’utilisation de soufflantes carénées intéresse ses équipes de recherche et de développement. Ce système de propulsion sera par la suite utilisé sur des appareils à décollage verticaux plus complexes comme le VXT-8. Cela a également été repris sur une proposition de "Jeep volante", soit un aéronef léger constitué d’un cadre simple et robuste propulsé par une turbine centrale entrainant quatre hélices carénées. Mais là encore, l’UH-1 de Bell est déjà largement supérieur…
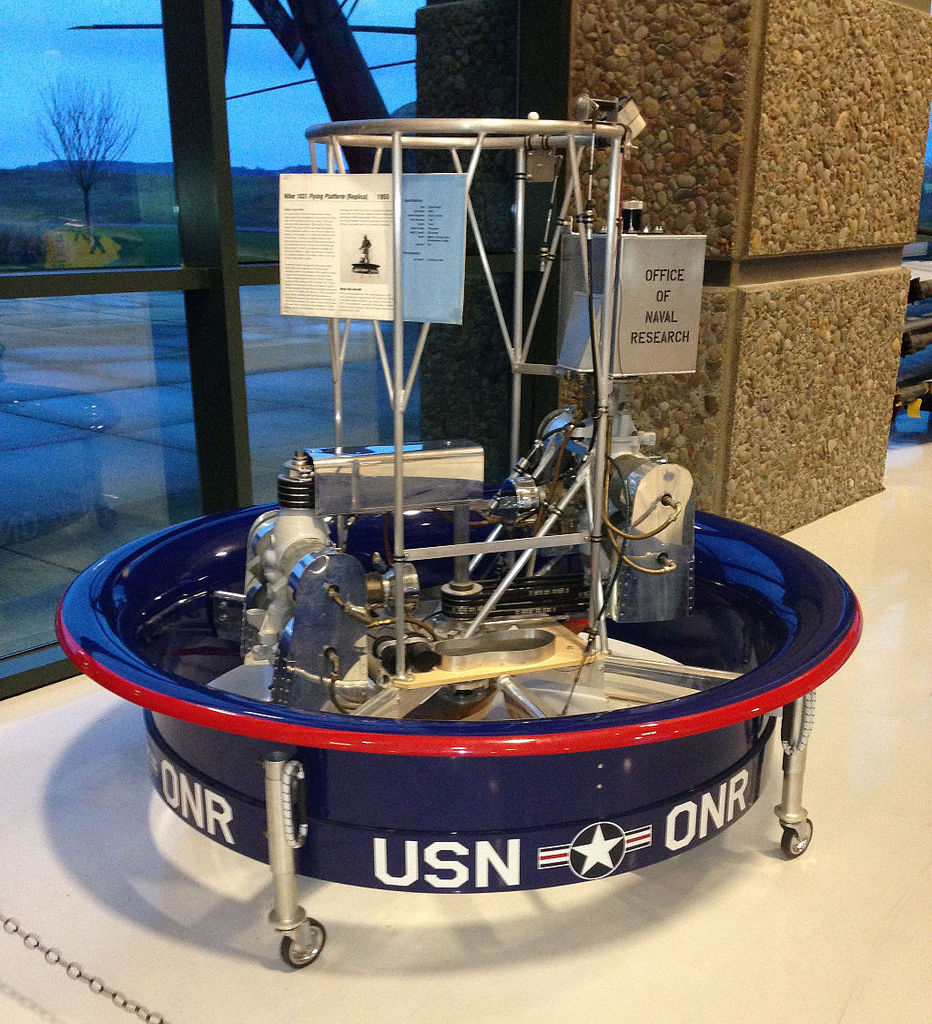
Deux des six prototypes sont encore visibles dans des musées, ce sont tous deux des Model 1031-A-1. Un est situé au Hiller Aviation Museum à San Carlos, en Californie, et l'autre est au National Air and Space Museum à l’Udvar-Hazy Center à Chantilly, enVirginie. De plus, une réplique de la plate-forme Model 1031 est exposée à l'Evergreen Aviation & Space Museum.
Versions :Model 1031 : Désignation d’usine de l’appareil motorisé par deux moteurs à pistons Nelson, le diamètre de la conduite de propulsion est de 1,52m et il est muni de quatre pieds; un appareil construit.
Model 1031-A : Semblable au Model 1031, ses deux moteurs à pistons Nelson sont couplés pour plus de sécurité ; un exemplaire construit.
Model 1031-A-1 : Semblable au Model 1031, il est motorisé par deux moteurs à pistons Nelson couplés et le diamètre de la conduite de propulsion est de 2,13m; un appareil construit.
YHO-1E "Flying Platform" : Désignation militaire du Hiller Model 1031 lorsque c’était l’Office of Naval Research qui gérait le programme.
VZ-1 "Pawnee" : Désignation militaire de l’YHO-1E lorsque l’US Army reprend le programme vers 1957.
VZ-1E "Pawnee" : Prototypes motorisé par trois moteurs à pistons Nelson couplés, le diamètre de la conduite de propulsion est de 2,44m, la hauteur de la conduite est plus importante, il est muni d’un patin d’atterrissage circulaire et le pilote est assis; trois appareils construits.
Utilisateurs militaires :USA : 3 exemplaires en évaluation pour le compte de l’US Army par l’US Navy et 3 exemplaires en évaluation au sein de l’US Army de 1957 à 1963.
Caractéristiques (Model 1031-A-1):Equipage : 1
Passagers : 0
Longueur : 2,54m
Envergure : 2,54m
Hauteur : 2,13m
Diamètre du rotor principal : 2,13m
Surface du rotor principal: 3,56m2
Masse à vide : 167,8kg
Masse maximale au décollage : 251,7kg
Charge utile : 84kg
Points d’attache : 0
Moteurs :Deux moteurs à pistons Nelson H-56 de 30kW (40cv) ou H-59 de 33kW (44cv) (selon les sources).
Performances :Vitesse max : 26km/h
Hauteur de vol : 10m/sol
Distance de décollage : 0m
Distance d’atterrissage : 0m
Armement :Sans (armes personnelles du soldat-pilote).
Liens internet :https://en.wikipedia.org/wiki/Hiller_VZ-1_Pawneehttp://www.aviastar.org/helicopters_eng/hiller_platform.phphttps://airandspace.si.edu/collection-objects/hiller-model-1031-1-flying-platfo…http://www.airvectors.net/avplatfm.htmlhttp://www.globalsecurity.org/military/systems/aircraft/vz-1.htmhttp://www.hiller.org/event/flying-platform/


 un peu trop loin pour moi !
un peu trop loin pour moi !







 Général d'armée aérienne
Général d'armée aérienne

 Général de corps aérien
Général de corps aérien
